|
1. ■GPS의 개발경위 및 시스템 구성과 궤도
■ GPS란 무엇인가
 사방을 둘러봐도 수평선뿐인 망망한 바다를 항해하는 선박이 현재 위치를
알기 위하여 오래 전부터 이용해 온 방법은 맑은 밤하늘에 빛나는 성좌의 방위을
관측하여 항로를 정하는 것이었다. 이 방법을 천문항법이라 부르는데, 현재도 이용되고
있지만, 주야 구별없이 또 기상조건의 영향을 받지 않는 로란, 데카, 오메가 등의
전파항법이 널리 이용되고 있다. 이러한 시스템은 육상에 설치된 복수의 송신국으로
부터 전파를 수신해서 거리를 구하여 현재의 위치를 파악하는 것으로(측위라고 한다),
쌍곡선 항법이라고도 부른다. 그리고 현재까지의 항법 시스템과는 비교도 되지 않을
정도의 정확성으로(오차 ±수십 m) 지구상의 어느 곳에서도 이용할 수 있는 인공위성을
이용한 항법 시스템이 널리 이용되고 있다. 사방을 둘러봐도 수평선뿐인 망망한 바다를 항해하는 선박이 현재 위치를
알기 위하여 오래 전부터 이용해 온 방법은 맑은 밤하늘에 빛나는 성좌의 방위을
관측하여 항로를 정하는 것이었다. 이 방법을 천문항법이라 부르는데, 현재도 이용되고
있지만, 주야 구별없이 또 기상조건의 영향을 받지 않는 로란, 데카, 오메가 등의
전파항법이 널리 이용되고 있다. 이러한 시스템은 육상에 설치된 복수의 송신국으로
부터 전파를 수신해서 거리를 구하여 현재의 위치를 파악하는 것으로(측위라고 한다),
쌍곡선 항법이라고도 부른다. 그리고 현재까지의 항법 시스템과는 비교도 되지 않을
정도의 정확성으로(오차 ±수십 m) 지구상의 어느 곳에서도 이용할 수 있는 인공위성을
이용한 항법 시스템이 널리 이용되고 있다.
GPS(Global Positioning System)는 미 국방성에서 개발한 것을 위성을 이용하여 위치,
속도 및 시간측정 서비스를 제공하는 시스템이다. GPS는 3차원 위치, 고도 및 시간의
정확한 측정을 할 수 있고, 24시간 연속적으로 서비스를 제공할 수 있으며, 기상조건,
간섭 및 방해에 강하고, 전세계적인 공통 좌표계를 사용한다는 특징이 있다. 지금까지
20년 이상 오랜 세월에 걸쳐 개발하고 있는 GPS는 지구의 주위를 선회하는 24개의
인공위성과 5개소의 감시국, 그리고 제어국으로 구성된다. 유저는 종래의 전파항법
시스템과 마찬가지로 전용의 수신기를 설치하는 것만으로 정확한 위치를 알 수 있는
것이다.
 원래 군사 목적으로 개발된 GPS 위성으로부터는 표준 측위와 고확도
측위를 목적으로 두 종류의 신호가 발사되고 있다. 즉 표준측위서비스(SPS:Standard
Positioning System)와 정밀측위서비스(PPS:Precise Positioning System)로 나누어지는데,
SPS는 민간이라도 이용할 수 있도록 개방한 서비스이며, PPS는 주로 군사 부문의
용도에 사용된다. SPS는 앞서 언급한 선박뿐만 아니라 항공기, 그리고 나중에 소개하는
자동차 내비게이션 시스템과 같이 자동차에도 탑재됨에 따라 지금까지 실현할 수
없었던 새로운 응용의 길을 터놓았다. 이에 따라 각 일렉트로닉스 메이커와 자동차
생산 회사를 비롯한 여러 회사에서 GPS 수신기와 응용 제품을 개발하여 선보이고
있다. 이들 제품의 일례도 나중에 소개 하기로 한다. 원래 군사 목적으로 개발된 GPS 위성으로부터는 표준 측위와 고확도
측위를 목적으로 두 종류의 신호가 발사되고 있다. 즉 표준측위서비스(SPS:Standard
Positioning System)와 정밀측위서비스(PPS:Precise Positioning System)로 나누어지는데,
SPS는 민간이라도 이용할 수 있도록 개방한 서비스이며, PPS는 주로 군사 부문의
용도에 사용된다. SPS는 앞서 언급한 선박뿐만 아니라 항공기, 그리고 나중에 소개하는
자동차 내비게이션 시스템과 같이 자동차에도 탑재됨에 따라 지금까지 실현할 수
없었던 새로운 응용의 길을 터놓았다. 이에 따라 각 일렉트로닉스 메이커와 자동차
생산 회사를 비롯한 여러 회사에서 GPS 수신기와 응용 제품을 개발하여 선보이고
있다. 이들 제품의 일례도 나중에 소개 하기로 한다.
GPS는 원리가 매우 간단하나 응용 분야는 광범위하며, 크게 나누면 다음과 같다.
지상운송: 첨단 교통관제, 여행자 정보 시스템
해상운송: 선박항해
항공운송: 첨단 항공관제
군사: 군용기 항법, 유도무기, 정밀폭격, 정찰
응급, 구조: 구급차, 경찰 순찰차, 정찰
과학: 기상 연구, 해류 연구, 대류층 연구, 지각운동 연구
우주: 위성의 위치 및 시간정보 제공
■ GPS의 개발 경위와 시스템 구성
 GPS는 정식으로는 NAVSTAR/GPS라 부른다. 이것은 NAVigation System
with Time And Ranging/Grobal Positioning System의 머리문자를 딴 것이다. 이 명칭은
인공위성의 이름에도 사용되는데, 이 경우는 System을 Satellite로 대치한다. GPS의
전신은 미 해군이 개발하고 있던 TIMATION(TIMe And navigaTION)과 미 공군의 621B의
두 프로젝트이다. 이것을 1973년에 미 국방성이 통일하여 NAVSTER/GPS로 명명한 것이다. GPS는 정식으로는 NAVSTAR/GPS라 부른다. 이것은 NAVigation System
with Time And Ranging/Grobal Positioning System의 머리문자를 딴 것이다. 이 명칭은
인공위성의 이름에도 사용되는데, 이 경우는 System을 Satellite로 대치한다. GPS의
전신은 미 해군이 개발하고 있던 TIMATION(TIMe And navigaTION)과 미 공군의 621B의
두 프로젝트이다. 이것을 1973년에 미 국방성이 통일하여 NAVSTER/GPS로 명명한 것이다.
그리고 1968년부터 1985년까지 11개의 실험위성(블록Ⅰ)을 발사했다. 그 중에서 1개의
위성이 발사에 실패했고 3개가 고장, 그리고 1개의 위성이 탑재한 원자시계의 고장으로
이용할 수 없게 되어 결국 사용할 수 있는 것은 6개로 되어 있다. 동시에 수신기가
만들어져 이들 블록Ⅰ 위성을 사용하여 실험이 실시되었다. 수신기의 제작을 담당한
메이커는 마그내복스, 텍사스인스트루먼트, 록웰인터내셔널의 3社였다.
이 실험에 의해 충분히 실용이 되는 확도의 측위가 가능하다는 것이 판명되어 실용
위성(블록Ⅱ)을 발사하려던 참에 1986년 1월에 스페이스 셔틀, 첼린저호의 고장으로
인하여 발사가 중지되고 말았다. GPS 위성의 발사에도 스페이스 셔틀을 사용할 예정으로
되어 있었기 때문이다.
이 블록Ⅱ 위성의 발사가 개시된 것은 첼린저의 사고로부터 3년 후인 1989년 2월
14일에 발사되었다. 그후 계속 대체로 순조롭게 블록 III 위성이 발사됨에 따라 현재는
24개의 위성으로 구성되어 있다.
그러면
현재 GPS의 시스템 구성에 대해 언급한다.
GPS는 3개의 부문, 즉 위성부분, 지상관제 부문, 사용자 부문으로 구성되어 있다.
위성부분은 6개의 궤도면에 24개의 위성으로 구성, 고도 20,200km, 경사각이 55도이며,
주기가 12시간이다. 위성은 사용자가 최소한 5개의 위성으로부터 신호를 수신할 수
있도록 배치되어 있으며, 각각의 위성은 2개의 L밴드 주파수, 즉 L1(1,575.42MHz)
및 L2(1,227.6MHz)를 송신한다. L1은 P 코드(Precise code) 및 C/A 코드(Coarse/Acquisition)을
반송하며, L2는 P 코드를 반송한다. 이들 코드에 항법 데이터가 중첩되며, L1과 L2에
의해 반송된다.
지상관제 부분의 구성는 5개의 감시국으로 이루어져 있으며, 이들 중에서 3개는 상향
링크(Up-Link)로 전송하는 기능이다. 감시국은 GPS 수신기를 이용하여 보이는 모든
위성을 수정적으로 추적하며 거리 측정 데이터를 축적한다. 감시국에서 수집된 정보는
주관제소에서 처리되어 GPS 위성의 궤도 결정 및 제어에 사용된다.
사용자 부문은 안테나와 수신기로 구성되어 있으며, 위성신호를 수신하여 위치, 속도
및 시간을 계산한다.
■ GPS 위성의 궤도
 앞서 언급한 바와 같이 GPS는 미국 국방성이 개발을 추진해 온 인공위성을
이용한 전지구 규모의 내비게이션 시스템이다. 현 시점에서 이용 가능한 위성은 24개가
표준이다. 앞서 언급한 바와 같이 GPS는 미국 국방성이 개발을 추진해 온 인공위성을
이용한 전지구 규모의 내비게이션 시스템이다. 현 시점에서 이용 가능한 위성은 24개가
표준이다.
인공위성이라
하면 여하튼 방송위성이나 통신위성과 같이 정지위성을 연상하는 사람도 많을 것이다.
그러나 GPS 위성은 지구의 주위를 도는 윈궤도에 실려 있다. 궤도의 반경은 약 26,500km,
지구의 표면에서 약 20,000km의 높이가 된다. 블록Ⅱ 위성을 기준으로 그 궤도는
지구의 적도면에 대해 55도의 기울기를 가지고 등간격으로 6개가 있으며, 각각의
궤도에 4개의 위성이 배치되어 있다.
위성이
지구를 도는 주기는 0. 5 항성일(恒星日)로 되어 있다. 지구국에서는 항상 위성의
궤도를 감시하고 위성이 이 주기로 지구를 선회하도록 고도를 제어하고 있다. 이
항성일이란 지구가 항성계에 대하여 1회전하는데 걸리는 시간이며, 23시간 56분 4.09초로
되어 있다. 이것은 지구가 360도 회전하는 시간에 해당한다. 우리가 1일이라 정하고
있는 것은 지구가 태양 방향을 향하는 주기로서, 실제로 지구가 1회전하는 시간보다
3분 55.91초 길어진다.
0.5 항성일의
주기로 돌고 있는 위성은 완전히 지구의 자전과 동기하고 있다. 즉 위성은 항상 같은
장소의 상공을 통과한다. 이 때문에 GPS 측위가 가능한 시각이 하루에 약 4분 빨라지는
것이다.
2. GPS의
측위원리와 수신 시스템
■ GPS의 측위 원리
 GPS에 의한 측위는 위성으로부터 발사되는 전파의 지연시간을 계측하고
궤도로부터의 거리에서 현재의 위치를 구하는 방법이다. 우측 그림에 3개의 위성에
의한 원리를 나타냈는데, 하나의 위성으로부터의 거리를 알면 현재의 위치는 위성을
중심으로 하여 반경이 그 위성으로부터의 거리로 되는 구(球)의 표면의 어느 곳으로
된다. 이것에 또 하나의 위성으로부터의 거리를 알면 현재의 위치는 두 구가 서로
겹치는 원주상의 어느 곳으로 된다. 그리고 3번째 위성으로부터의 거리에 의해
그 구와 이 원의 두 교점에서 어느 한 곳으로 된다. GPS에 의한 측위는 위성으로부터 발사되는 전파의 지연시간을 계측하고
궤도로부터의 거리에서 현재의 위치를 구하는 방법이다. 우측 그림에 3개의 위성에
의한 원리를 나타냈는데, 하나의 위성으로부터의 거리를 알면 현재의 위치는 위성을
중심으로 하여 반경이 그 위성으로부터의 거리로 되는 구(球)의 표면의 어느 곳으로
된다. 이것에 또 하나의 위성으로부터의 거리를 알면 현재의 위치는 두 구가 서로
겹치는 원주상의 어느 곳으로 된다. 그리고 3번째 위성으로부터의 거리에 의해
그 구와 이 원의 두 교점에서 어느 한 곳으로 된다.
이것을 수식으로 표시하면,
Pr=R+CΔT
(Pr:의사거리, R:실제거리, C:광속도, ΔT:수신기 시계오차)
여기서
의사거리(Pseudorange)란, GPS 위성으로부터 발사되는 신호가 유저 수신기에 도달되는
시간에 광속도를 곱하여 위성과 사용자 사이의 거리가 계산되는데, 이 거리에는 주요한
오차인자로 사용자 시계오차에 의한 거리오차가 포함되어 있다. 이렇게 측정된 거리를
의사거리라 부른다.
공간상에서
GPS 위성의 위치를 x, y, z, 사용자의 위치를 xu,
yu, xu라 하면 위식은 다음과 같이 나타낼 수 있다.

위의
식에서 GPS x, y, z는 GPS 위성으로부터 구해지므로, 미지수 xu, yu, zu 및 ΔT의 4개므로 해를 구하기 위해서는 4개 또는 그 이상의 방정식이
있어야 한다. 그러므로 아래 그림 "4개의 위성에 의한 위치측정(DGPS)"에서
보듯이, 최소 4개의 위성으로부터 데이터를 수신하여 사용자의 위치를 결정한다.
좀더
알기 쉽게 설명하기로 한다.
GPS 위성은 지구의 표면에서 약 20, 000km의 원궤도를 선회하고 있다. 그리고 항상
안테나를 지구로 향하여 전파를 발사하도록 자세를 제어하고 있기 때문에 앞서 언급한
두 교점의 한쪽에서는 위성으로부터 전파를 수신할 수 없는 장소로 되며, 하나의
장소로 확정되는 것이다.
위성으로부터의 거리를 측정하기 위하여 GPS 위성에는 루비듐과 세슘 원자시계가
탑재되어 모든 위성이 동시에 신호를 송신하도록 되어 있다. 위성과 마찬가지로 수신기에도
같은 확도의 시계가 있으며, 위성으로부터 송신되는 타이밍이 알려져 있다면 위성으로부터의
신호가 수신기까지 도달하는데 걸리는 시간과 전자파의 전달속도로부터 거리를 계산할
수 있다. 그러나 수신기를 소형으로, 그리고 저가격으로 만들려면 가격이 높은 원자시계를
사용할 수 없다. 따라서 그 대신에 고정밀도의 수정발진기에 의한 시계를 사용하는데,
여하튼 위성 시계와의 사이에 오차가 발생하여 정확한 위치를 특정할 수 없게 된다.
이러한 문제를 해결하기 위하여 정확한 위도, 경도, 고도를 얻기 위하여 필요한 3개의
위성으로부터의 거리에 다른 하나의 위성으로부터의 거리를 더하여 정확한 시각을
구하게 된다. 수신기에서 구한 4개의 위성으로부터의 거리에는 수신기의 시계오차에
의한 공통의 거리 차이가 포함되어 있으므로 이것을 제거하고 계산을 수신기에서
한다.
이와 같이 정확한 측위를 하려면 4개의 위성으로부터 전파를
수신할 필요가 있다. 이것을 3차원 측위라 부른다. 이에 대해 2차원 측위란 위도와
경도만 아는 방법이며, 고도를 이미 알고 있는 것으로 하고 계산한다. 2차원 측위는
3개의 위성으로부터 신호를 수신하는 것만으로 가능하게 된다. 이것은 아직 충분히
위성이 배치되어 않았던 당시의 상태이거나, 건물이나 산간지에서 4개의 위성으로부터
전파를 수신할 수 없는 상태에서도 위치를 알 수 있는 수단이 되며, GPS를 이용할
수 있는 시간이나 지역을 넓히는데 유효하게 작용한다. 그러나 수신기에 설정된 고도가
정확하지 않은 경우에도 측위한 위도, 경도에 오차가 포함되므로 주의가 필요하다.
지금은 최종적으로 지구를 에워싼 6개의 궤도에 각각 4개의 위성이 배치된 GPS이다.
이 상태에서는 지구상의 어느 장소에서도 항상 4개 이상의 위성이 상공에 존재하게
되며, 고확도의 측위를 할 수 있도록 되어 있다. 이 24개의 위성에는 예비기도 포함되어
있는데, 평상시에는 이들의 예비기도 측위를 목적으로 이용되는 액티브 스페어 방식이
채택되고 있다.
■ GPS 위성의 송신신호
GPS
위성으로는 실험용의 블록Ⅰ과 실용위성인 블록Ⅱ, 그리고 그 후속기인 블록Ⅲ이
있다. 블록 Ⅱ의 위성은 수명이 약 7년 반 정도로 설계되어 있었다. 일반적으로 위성의
수명을 결정하는 것은 궤도 수정을 하기 위해 필요한 연료를 어느 정도 탑재하는가에
달려 있다. 궤도상의 위성에 연료를 보급하는 것은 그리 쉬운 일이 아니며, 발사
단계에서 탑재할 필요가 있다. 그리고 이 GPS 위성에는 원자시계가 탑재되어 있으며,
이것의 수명도 그다지 길지 않다.즉 1989년에 발사된 블록 Ⅱ의 위성은 1997년에는
수명이 다하여 사용할 수 없게 됨에 따라 새로운 위성이 필요하게 되었는데, 이것이
블록Ⅲ이다.
이들 위성은 발사시의 중량이 800kg을 초과하는 비교적 대형 위성이다. 이 위성에는
세시움과 루비듐의 원자시계를 각각 2대씩 탑재하고 있다. 이 두 종류의 원자시계
가운데서 세시움 원자시계는 1967년 10월 제13회 국제도량형총회에서 국제적으로
시간을 결정하는 원기(原器)로 정한 것이다. 이것은 세시움 원자의 기저상태에 있어서
두 초미세준위 간의 추이에 대응하는 방사의 9,192,631,770 주기의 계속시간을 1초로
하기로 한 것이다.
간단히 표현하면 세시움의 원자 진동주파수를 9.192631770GHz로 정한 것인데, 이
주파수를 토대로 시간을 매기는 시계가 표시하는 시각을 원자시(TAI)라 부르고 있다.
우리가 이용하고 있는 시간도 이 세시움 원자시계를 기준으로 하고 있는데, 지구의
자전을 기준으로 한 시각간의 차이가 1초를 넘는 경우에 1초 단위로 조정하는 협정
세계시(UTC)로 되어 있다. 지구의 자전은 차츰 느려지고 있으며, 지금까지 행한 조정은
모두 1초의 삽입으로, 윤초(閏秒)라 부르고 있다.
세시움 원자 진동주파수의 안정도는 대단히 우수하며 10-12 정도의 확도로 되어 있다. 3만년에 ±1초의 오차라고 하면 그 확도가
어느 정도라는 것을 과히 짐작할 수 있을 것이다. 또 하나의 루비듐 원자시계는 세시움
원자시계에 비하면 확도가 약간 떨어지는 것으로 되어 있다. 그러나 세시움 원자시계보다
소형이고 취급도 간편하기 때문에 세시움 원자시계의 백업으로 위성에 탑재되어 있는
것으로 생각된다.
이 GPS 위성이 지구로 향해 송신하고 있는 신호는 모두 이 원자시계로부터 얻어지는
안정한 주파수로 만들어지고 있다. 기준이 되는 주파수는 10. 23MHz이고, 표준 측위를
위한 반송파는 이 주파수의 154배인 1.57542GHz(L1)이며, 고확도 측위에서는 120배인
1.2276GHz(L2)로 되어 있다. 또 송신되는 데이터의 클록 주파수도 이 기준주파수와
정수배의 관계로 되어 있다.
실제 위성상에서의 기준주파수는 10.23MHz보다 0.00455Hz 낮은 주파수로 되어 있다.
이것은 일반 상대성 이론에 기인하여 위성의 궤도상에서 받는 중력이 지구상과 다르기
때문에 발생하는 오차를 보정하기 위함이다. 지구상에서 수신하면 정확히 10.23MHz가
된다.
GPS 위성은 일종의 방송위성으로, 메시지를 반복해서 송신하고 있다. 수신기에서는
이 정보로부터 각 위성의 상황이나 정확한 위성의 위치를 알고 전파가 도달하는데
요하는 시간에서 현재 위치를 구하는 계산을 한다.
이들 정보는 표준측위용의 L1, 고정밀측위용인 L2의 양쪽 반송파(캐리어)에 의해
송신되고 있지만, 고확도 측위는 군사용으로만 그 이용이 제한되고 있다. 민간의
이용이 인정되고 있는 표준 측위에 관한 정보만 공개되어 있다.
이
표준 측위에서는 1.57542GHz의 반송파가 사용되고 있다. 항법 메시지는 위의 그림
"GPS 항법 메시지의 구성"에 나타낸 바와 같이 하나의 프레임이 1,500피트의
크기이며, 이것을 50비트/초의 속도로 송신하고 있다. 1프레임은 5개의 서브 프레임으로
구성되며, 최초 3개의 서브 프레임의 내용은 같지만 4번째와 5번째는 위성의 개별정보(almanac이나
전리층의 보정계수)로 되어 있으며, 프레임마다 내용이 바뀐다. 이것을 페이지라
부르며, 1부터 25 페이지까지 있다. 이 모두를 마스터 프레임이라 부르고 있는데,
시스템 전체의 정보를 수집하는데 12.5분의 시간이 걸린다.
모든 GPS 위성이 송신하고 있는 반송파(캐리어)의 주파수는 동일하다. 단순히 생각하면
혼신을 일으킬 것 같지만, 이것을 방지하기 위하여 스펙트럼 확산의 통신방식을 채택하고
있다. 이 방식은 위성마다 각각 다른 암호를 부여하고, 미리 그 코드로 데이터를
변조하고 나서 반송파를 변조하는 것이다. 이 코드를 발생하는 주파수는 전송해야
할 데이터의 속도보다 충분히 높게 선택한다. GPS에서는 직접확산이라 부르는 방식으로
반송파의 변조에 PSK가 이용되고 있다.
이 변조방식은 아래의 그림 "PSK 변조의 개념"에 나타낸 바와 같이 데이터의
1과 0에 대응한 반송파의 위상을 180도 변화시킨 것으로 2상위상변조라고도 부른다.
GPS에서는 개개의 위성에 각기 다른 코드를 설정하고 데이터를 넓은 대역으로 학산시킴으로써
복수의 위성이 같은 주파수의 대역을 공유할 수 있도록 하고 있다.
위성으로부터
정보를 수신하기 위해서는 각 위성의 고유 코드를 수신기가 해독하고 있을 필요가
있다. 표준 측위용으로 사용되고 있는 것이 C/A 코드(공개되어 있다)라 부르는 것으로,
이것은 고확도 측위에서 사용되는 P코드(비밀)를 보정하는 데에도 사용된다. C/A란
Clean and Acquisition 또는 Coarce and Acquisition의 약자이며, P는 Precision
또는 Protect의 의미이다.
C/A 코드의 길이는 1.023비트, 클록 주파수는 1.023MHz로 되어 있다. 즉 이 코드의
반복은 1ms로 된다. 또 P코드쪽은 클록 주파수가 10배인 10.23MHz이고 반복주기는
1주간의 코드가 사용되고 있다. 여기서 길이를 계산하면 6.187014×1012비트라는 터무니없는 길이로 되어 사실상 해석은 불가능하게
되어 있다.
이 C/A 코드의 발생에 사용되고 있는 것은 2조의 10비트 시프트 레지스터에 의한
의사잡음 발생회로의 출력을 합성한 것으로, 골드 부호 발생회로라 부르는 것이다.
한쪽의 의사잡음 발생회로는 M계열이라 부르는 회로이며, 2N-1 주기의 코드를 발생한다. 다른 한쪽의 잡음발생 회로도 마찬가지로
2N-1 주기의 코드를 발생하는 회로인데,
시프트레지스터의 임의 두 출력의 배타적 논리합을 출력으로 하고 있다. 10개의 출력에서
2개를 선택하는 조합은 45종류가 된다. 즉 이 회로에 의해 45종류의 각기 다른 코드가
발생되며, 각 위성에 할당되고 있다. 이것이 PRN 번호로 되어 있다.
3.
GPS
수신 안테나와 수신장치의 구성
■ GPS 수신 안테나
 GPS에 의한 측위를 하려면 동시에 4개의 위성으로부터 전파를 수신해야
한다. 인공위성이라 하면 패러보릭 안테나를 연상하겠지만, GPS의 경우에는 여러
위성, 그것도 지구의 주위를 돌고 있으므로 패러보릭 안테나와 같은 지향성이 강하고
또 이득이 큰 안테나를 사용할 수 없다. GPS에 의한 측위를 하려면 동시에 4개의 위성으로부터 전파를 수신해야
한다. 인공위성이라 하면 패러보릭 안테나를 연상하겠지만, GPS의 경우에는 여러
위성, 그것도 지구의 주위를 돌고 있으므로 패러보릭 안테나와 같은 지향성이 강하고
또 이득이 큰 안테나를 사용할 수 없다.
GPS 수신기에서 사용되는 안테나는 여러 종류가 있는데, 이들은 그라운드 플레인의
상측에 반원 형태의 지향성을 가지며, 위성으로부터 송신되는 우선원(右旋圓) 편파를
수신하는 것이다. 측량용의 수신기에서는 직교 다이폴 안테나나 헤리컬 안테나, 선박용으로는
헤리컬 안테나가 사용되고 있는 것 같다. 또 돌기물을 꺼리는 항공기나 자동차에는
마이크로스트립 안테나가 사용된다.
직교 다이폴 안테나는 2조의 다이폴 안테나를 결합하고, 한쪽의 위상을 90도어긋나게
하여 선원(旋圓) 편파에 대응한 것이다. 비교적 간단한 구조로 설계가 용이하다는
특징이 있지만, 그라운드 플레인을 설치, 수평면 이하의 감도를 갖지 않도록 할 필요가
있다.
헤리컬 안테나는 도체를 코일 모양으로 감은 것인데, 4개의 도체가 꼬여
있는 것처럼 되어 있는 직교 헤리컬 안테나도 있다. 이 타입의 안테나는 최적한 이득이
얻어지고 지향성도 양호하지만, 구조가 복잡하고 조정도 필요하게 되는 등 결점이
있다.
마이크로스트립 안테나는 도체로 절연체를 샌드위치 모양으로 구성한 구조이며, 프린트
기판과 같이 쉽게 제조할 수 있다는 특징이 있다. 다른 안테나에 비하면 감도가 낮다는
문제가 있지만, 양산성이 우수하기 때문에 최근의 수신기에서는 이 타입이 널리 이용되고
있다.
GPS 신호는 앞에서 설명한 바와 같이 스펙트럼 확산에 의해 위성으로부터 송신되는
신호가 넓은 대역에 걸쳐 확산되고 있다. 수신하는 안테나는 이 대역에 걸쳐 안정한
감도가 요구된다. 또 P코드의 수신기나 일부 측량용의 수신기에서는 L1과 L2의 양쪽
신호를 수신할 수 있는 안테나가 필요하게 된다. 앞서 언급한 안테나에서 두 주파수에
대응할 수 있는 것은 헤리컬과 마이크로스트립 안테나이다.
위성으로부터의 신호는 넓은 대역에 확산되고 있기 때문에 에너지 밀도가 낮고 또
안테나도 무지향성이므로 안테나 이득은 거의 기대할 수 없다. 더구나 주파수가 1GHz
이상으로 높고 안테나와 수신기를 접속하는 동축 케이블에서의 감쇠도 커진다.
GPS 수신기의 안테나에서는 이 감쇠를 보정하고 또 잡음을 경감시키기 위하여 안테나에
20~40dB 이득의 저잡음 증폭기(LNA)를 내장하거나, 수신기의 일부인 주파수 변환회로를
내장하고 있다. 안테나와 수신기를 접속하는 동축 케이블에는 안테나 내부에서 필요로
하는 전원이나 주파수 변환용의 국부발진 주파수 신호도 중첩되어 있으므로 수신기에
지정되어 있는 안테나 이외는 사용할 수 없는 것이 보통이다.
■ 일반적인 GPS
수신 안테나의 사양
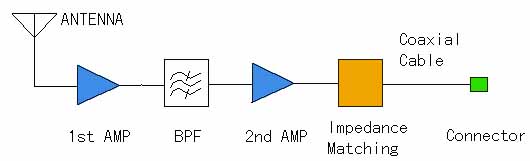
GPS 안테나는 GPS 위성으로부터
보내져 오는 미약한 신호를 증폭하기 위해, 안테나 소자 바로 밑에 20~40dB 정도
증폭하는 저잡음 앰프를 필요로 한다. 앰프의 전원은 GPS 수신기로부터 동축 케이블에
실어 공급한다.
항
목 |
사
양 |
비
고 |
안테나 |
주파수 |
1575.42MHz±1MHz
|
|
편파 |
우선원편파 |
|
이득 |
-5.0dBi 이상 |
앙각5~90°
|
축비 |
3.0dB 이상 |
앙각 90°
|
출력 VSWR
|
1.5 이하 |
|
프리앰프 |
주파수 |
1575.42MHz±1MHz
|
|
이득 |
26dB |
|
잡음지수(NF)
|
1.5dB 이하 |
|
입출력 VSWR
|
2.0 이하
|
|
출력 임피던스 |
50Ω |
|
전원전압 |
DC+5V |
|
소비전류 |
10mA~25mA
|
|
감쇠특성 |
18dB 이상 |
1575.42MHz±50MHz
|
동축 케이블 |
1.5DS-QEHV,1.5DS-EXL
|
예) 일본
四國電線, 住友電工 |
커넥터 |
GT5-1S-HU
|
예) 일본
히로세전기, 일본압착단자 |
종합특성 |
28dBi |
앙각 90°,
케이블 손실 포함 |
■ 일반적인
GPS 안테나의 블록도
■ GPS 수신장치의 구성
현재
입수할 수 있는 수신기로는 선박, 항공기, 자동차 등의 이동체의 위치를 인식하기
위한 것과 고확도로 거리를 측정하기 위한 측량용이 있으며, 최근에는 등산, 여행용
초소형 수신기, GPS 수신장치와 손목시계를 결합한 제품도 등장했다.
수신기의
내부구성은 메이커에 따라, 그리고 용도에 따라 상당히 차이가 있는 것 같다. 측위
그 자체는 수신기에 내장한 마이크로컴퓨터에 의해 이루어지며, 그 프로그램에 따라서도
측위의 확도가 상당히 달라지는 것 같다. 여기서는 GPS 수신장치의 기본적인 구성과
원리에 대하여 설명한다.
GPS의
수신기는 아래 그림 "GPS 수신기의 구성"에 나타낸 바와 같이 크게 나누어
3개의 블록으로 구성되어 있다. 고주파부는 안테나로 수신한 1.2 또는 1. 5GHz의
신호를 취급하기 쉬운 낮은 주파수로 변환한다. 다음의 신호처리부에서는 스펙트럼
확산을 원래대로 복원시키는 역확산을 하여, 위성으로부터 보내져 오는 메시지와
의사거리를 얻는다. 마이크로컴퓨터부에서는 신호처리부로부터 얻어진 메시지와 의사거리에서
현재의 위치를 구하는 연산을 한다.
GPS
수신기의 내부는 일반 통신기기의 구조보다 상당히 복잡하다. 주파수 변환이나 중간주파증폭
등 이미 잘 알고 있는 부분도 있지만, 그것은 GPS 수신기의 아주 일부분에 지나지
않는다. 위성을 포착하거나 위치를 신출하는데 있어서 중요한 역할을 하고 있는 것이
마이크로컴퓨터이며, 어느 메이커의 수신기에서도 예외없이 16비트 이상의 처리 능력을
가진 것이 사용되고 있다.
신호처리부는 위성으로부터의 신호와 수신기 내부에서 발생한 PRN 코드의 발생을
신호처리부에 지시한다.
신호의 동기를 얻는 하나의 방법으로 아래 그림 "딜레이 로크루프에 의한 동기"에
나타낸 딜레이 로크 루프가 있다. 이것은 수신신호와 수신기 내부에서 발생한 PRN
코드가 완전히 일치하고 있으면 이들 신호를 평형변조기(믹서)에서 적산했을 때의
출력에 포함되는 반송파 주파수 성분이 최대가 되는 것을 이용하고 있다.
그림에 나타낸 바와 같이 3개의 믹서에는 각각 1/2 클록의 시간차가 있는 PRN 코드가
입력되고 밴드패스 필터와 검파기에 의해 믹서의 출력에 포함된 반송파 주파수 성분을
검출하도록 되어 있다. 이 회로는 상대적으로 1클록의 시간차가 있는 PRN 코드에
의한 반송파 주파수 성분이 같아지는 VCO(전압제어 발진기)를 제어한다.
즉, 의사거리와 그림에 나타낸 PRN 코드는 완전히 입력신호의 것과 일치하고, 이것과
입력신호를 적산한 출력에는 50bps의 메시지로 변조(PSK)된 신호가 나타난다. 의사거리는
수신신호와 일치한 PTN 코드이다. 이것과 수신기 내부의 기준신호(시계)와의 시간차가
의사거리로 취급된다.
GPS에
의한 측위는 동시에 3개 또는 4개의 위성으로부터의 의사거리가 필요하게 된다. 각각의
위성에는 다른 PRN 코드가 할당되어 있다. 즉, 수신기에서는 수신하는 위성의 수와
같은 정도의 신호처리부를 가질 필요가 있다.
가장 단순한 수신기로는 신호처리 회로가 하나 뿐인 1채널 수신기가 있다. 또 측량용의
수신기 가운데는 10채널이나 12채널로 된 것도 있다. 아래 그림 "채널수에 의한
수신기의 분류"는 이미 발표된 수신기를 탑재되어 있는 채널수로 분류한 것이다.
채
널 수 |
구
성 |
동
작 |
1채널 |
|
시분할로 4~5개의 위성을 추미한다
저가격의 수신기에 사용되고 있다. |
2~4채널 |
|
하나의 채널로 가장 높은 위성을
포착하면서 나머지 채널을 시분할로 사용하며, 합계 4~5개의 수신을
한다. |
5채널 이상 |
|
채널을 각각의 위성 전용으로 사용한다
고급 수신기에 사용되고 있다. |
기본적으로
1채널 수신기는 수신해야 할 위성의 PRN 코드를 순차 전환시켜 포착하여 각 위성에
대한 의사거리를 구한다. 회로가 아주 간단하고 소비전력도 적다는 등의 특징이 있다.
그러나 각 위성에 대한 의사거리의 동시성(同時性) 확보가 곤란하여 고속으로 이동하는
경우에 정보를 얻지 못할 가능성이 있다.
2채널부터 4채널 수신기에서는 하나의 채널을 가장 감도가 높은 위성 전용으로 사용하고,
남은 채널을 시분할하여 나머지 위성을 포착한다. 1채널 수신기보다는 복잡하게 되지만
다음에 설명하는 멀티채널 수신기보다는 간단하며, 또한 소형으로 되는 특징이 있다.
5채널 이상의 수신기로 되면 신호처리 회로를 각각의 위성 전용으로 사용한다. 측위에는
4개의 위성으로 충분하지만 다음에 이용할 수 있는 위성을 포착하기 위해 5번째 이후의
채널이 사용된다. 채널수가 많을수록 자유로이 위성을 조합할 수 있어 확도가 높은
측위가 가능하다.
이와 같이 GPS 수신기에는 몇가지 종류가 있으며, 각각 장단점이 있다. 측위의 성능에
대해서만 생각하면 가장 우수한 것이 다채널 수신기이지만 실제로는 소비전력이나
크기, 측위의 갱신시간, 그리고 가격 등 용도에 따라 가장 적합한 수신기의 구성을
선택할 필요가 있다.
자동차나 선박 등에서는 소형으로 소비전력이 적으며, 저가격인 수신기가 요구되는
경우가 적지 않다. 이와 같은 분야에서는 채널수가 적은 시분할형의 수신기가 적합할
것으로 생각된다. 이 시분할에는 고속으로 위성을 전환하는 멀티플렉스형과 그보다도
저속으로 전환하는 시퀀셜형이 있다.
지금까지 간단히 GPS 수신기의 구성을 설명하였는데, 측위의 확도는 탑재되어 있는
마이크로컴퓨터의 프로그램에 의해 크게 좌우된다. 이 내용에 대해서는 각 사가 모두
비밀로 하고 있으며, 공개되어 있지 않다. 또한 여기서 소개한 것 이외에도 여러
종류의 수신방식이 개발되고 있으며, 그 내용에 대해서도 발표되고 있지 않다. 따라서
현 시점에서는 한정된 메이커가 독자적인 기술을 구사하여 수신기를 개발하고 있는
실정이다.
■ 일반적인 GPS 수신기의 사양
항
목 |
사
양 |
비
고 |
수신주파수 |
1575.42MHz |
L1주파수,C/A코드 |
수신방식 |
연속포착 |
8채널 |
수신감도 |
-130dBm 이하 |
안테나 입력 |
위치 확도 |
SA없이 25m CEP |
50% |
속도 확도 |
SA없이 0.1m/s |
|
시간 확도 |
±500 나노초 |
정격 |
콜드 스타트 |
2분 이내 |
90% |
웜 스타트 |
45초 이내 |
90% |
핫 스타트 |
20초 이내 |
90% |
중단 재포착시간 |
평균 8초 |
10초이내 중단 |
|
평균 11초 |
5분이내 중단 |
|
평균 30초 |
2시간 이내 중단 |
고도 |
-1000~+18000m |
|
속도 |
최고 515m/sec |
|
가속도 |
4g |
|
급이동 |
20m/sec |
|
전원 |
+5VDC±5% |
|
안테나 공급전원 |
+4~+5V |
|
소비전류 |
200mA 이하 |
안테나 포함 |
■ 일반적인 GPS 수신기의 블록도
|